MSK Demodulation
A good MSK demodulator in Matlab
The design
I wanted to create a MSK demodulator in Matlab for the
Direct Digital Synthesizer (DDS)
Arduino thing that I made ( BPSK_test_on_DDS
) that could create modulation schemes that either the phase or frequency
changed. MSK is a continuous phase
frequency shift keying (CPFSK) using two frequencies where the baud rate is
exactly twice as fast as the spacing between the two frequencies. DDS chips
produce continuous phase when changing frequency due to the way they work, so
any FSK modulation scheme implemented on a DDS chip will also be CPFSK. In
addition, as long as we change the frequencies at just the right time we can
produce MSK using DDS chips. If we consider the baseband where 0 Hz is halfway
between the two frequencies, then the higher frequency will cause a rotation of
exactly a quarter of a circle in the anticlockwise direction while the lower
frequency will cause a rotation of exactly a quarter of a circle in the
clockwise direction. As you move only a quarter of the cycle per symbol if you
start on the real axis you end up on the imaginary axis and vice versa. This
means if you start on the real axis, exactly two symbols later you will once
again be on the real axis. By symmetry the same is true for the imaginary axis
but will be displaced by one symbol. As moving at a constant speed around a
circle produces a sine wave, an example of what the real and the imaginary
components of the circle might be can be pictured as follows where the 1s and
-1s are the signs of waves for each symbol period.
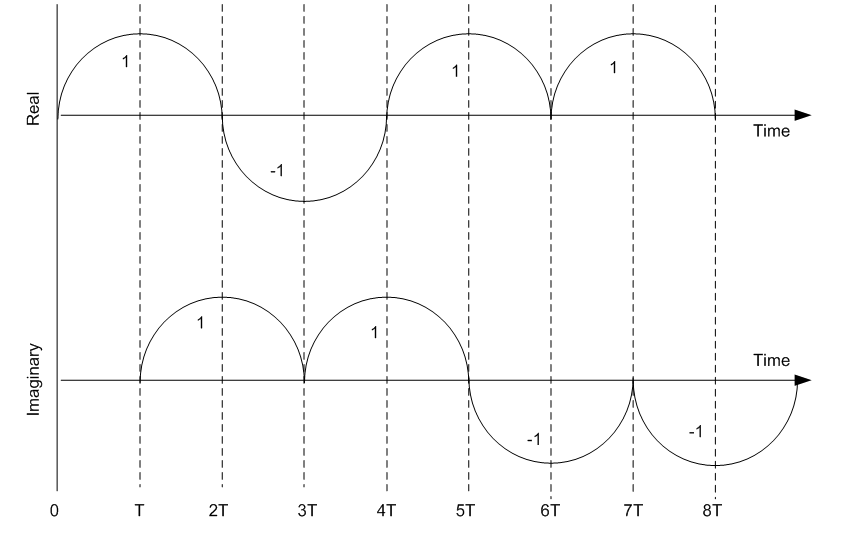
Real
and imaginary components of baseband MSK with respect to time (T is the symbol
period)
For another explanation of the same thing see http://www.dsplog.com/2009/06/16/msk-transmitter-receiver/
. This looks like two streams of data consisting of the 1s and -1s with one
data stream offset by period T. We can decode each stream independently and
then combine them later to produce the original data. However, we cannot simply
send these 1s and -1s symbols to the DDS
chip directly, as the DDS chip for MSK will be expecting one of two frequencies
which we denote with the + and - symbols. The following figure shows sending +
then – and + then +, either of which produces a 1 to be sent in the imaginary
stream as seen in the figure above.
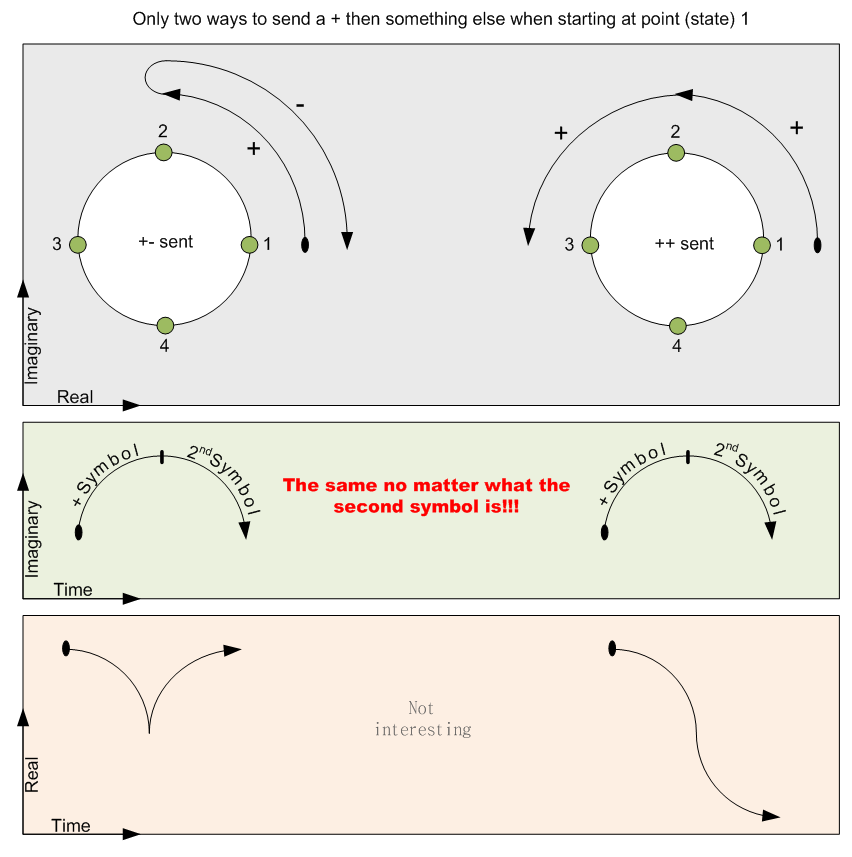
Using
two symbols rather than one at a time
To convert the 1/-1s into +/- we can use an encoder.
With a bit of thinking I realized that such an encoder could be written with
the following trellis diagram. It’s almost a convolutional
code but I don’t think it is as if you were to send a series of zeros the state
oscillates between states three and four and output’s +-+-+-….
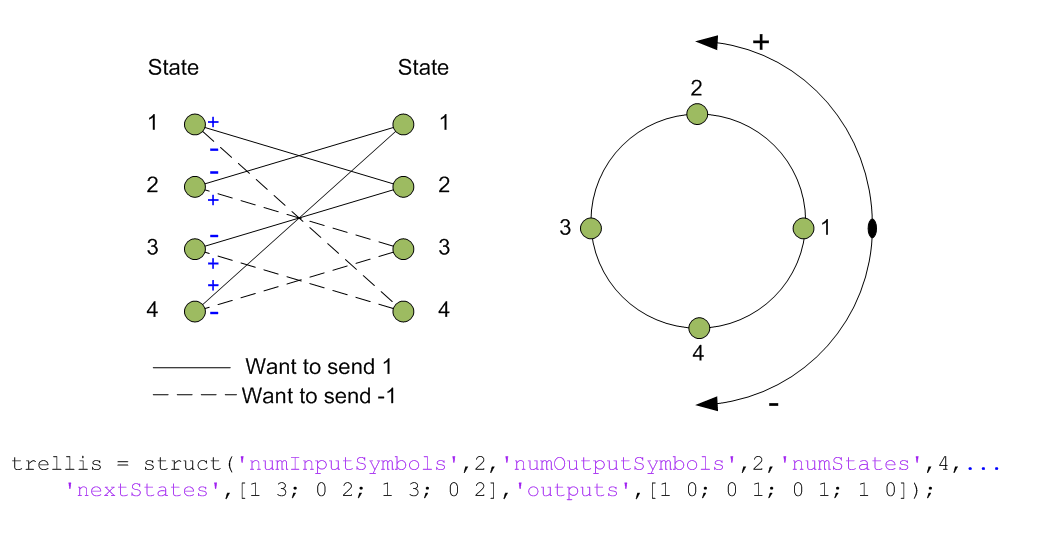
1/-1s to +/- encoder
So, for example if you are at state 1 and you want to
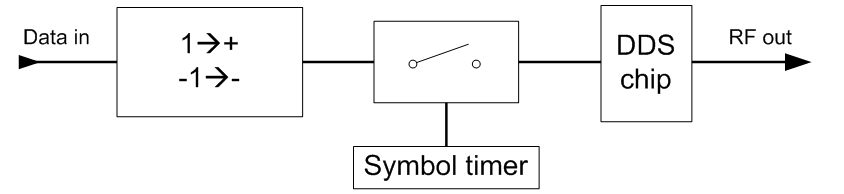
send a 1 then you output + and move to state 2. A block diagram of the MSK
modulator with the DDS chip is depicted in the following figure.
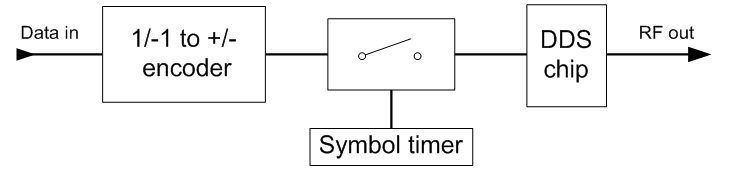
MSK Modulator block
diagram
The two data streams in the very first image can be
fed through a matched filter to maximize the probability of correct symbol
identification. This matched filter performs correlation with the kernel that
can be seen in the following figure.
Matched filter kernel
The kernel runs over each data stream, the points of
the kernel are multiplied with the data stream piece by piece and added up to
produce one value; the matched filter is a Finite
Impulse Response (FIR) filter. The response of this matched filter for an
MSK signal with correct carrier timing can be seen in the following figure.
Real and imaginary outputs
from the matched filter for an MSK signal with correct carrier timing
As the two data streams are offset by a period T, if
say the imaginary data stream is then delayed by a period T then the two data
streams are synchronous with one another and we can then visualize the two data
streams as if they will one. Such a data stream has four points and has a baud
rate of 1/(2T). The following picture shows the procedure to obtain this from
the passband.
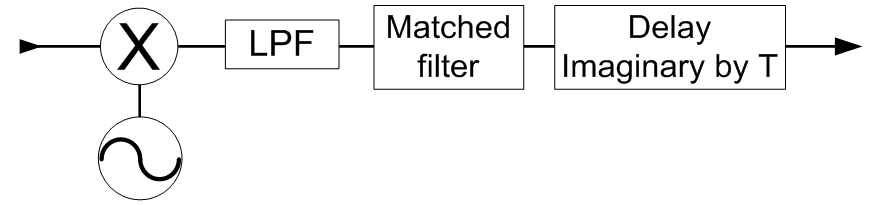
Obtaining the four point
constellation data stream
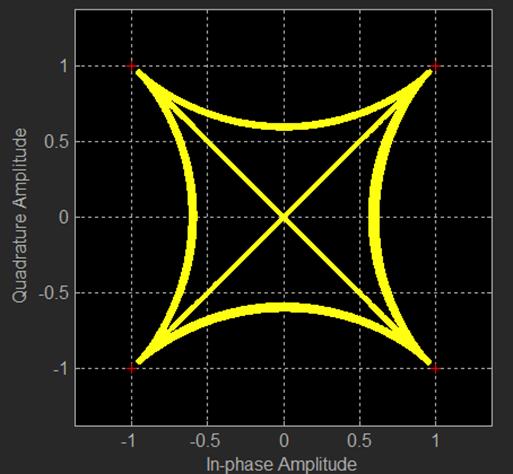
Once such a data stream is obtained, assuming perfect
carrier frequency and phase (the squiggly thing in the previous figure which is
the local oscillator matches that of the transmitter) we can produce a plot
like the following. The figure shows all points possible with the vertices
which are colored red being the location of the constellation points. If you
sample at the correct time you will see four yellow points sitting on the red +
marks; this contains the data of the two data streams and I call them “on
points”.
|
|
The dreaded symbol timing
and carrier tracking
Both symbol timing and carrier tracking must be performed
by a demodulator in order to deal with the differences between the modulator
and the demodulator. I find that when making a demodulator the symbol timing
and carrier tracking are by far the hardest things and can seem to be as if
these two aspects are all that a demodulator is. I was reluctant to read
scholarly type papers as I find them quite often a waste of time to read, and I
was reluctant to delve too much into the mathematics and instead see what I
could do just by insight and observation. Pretty much all I read was the very
useful blog http://www.dsplog.com/2009/06/16/msk-transmitter-receiver/
before attempting to make the demodulator, but this did not mention anything
about symbol timing or carrier tracking. My first attempt at a demodulator I
simply used a modified Gardner algorithm for symbol timing and used a fourth
power of the constellation points as an error function to track the carrier.
While this worked sort of okay with computer simulations with just Additive White Gaussian Noise (AWGN), the performance wasn’t
outstanding and with real-life tests proved pretty dismal. There are many
reasons why this did not work very well, firstly incorrect carrier alignment causes
both a rotation of the points and a dispersion of the points as can be seen in
the following figure so the fourth power trick is noisier than when using Phase Shift Keying (PSK), with the
fourth power carrier cycle slips were fairly common in real-life tests as I had
to keep the phase between -45° and +45° which is a fairly small range of
angles, both the symbol timing and carrier timing were not separate and one
could not be obtained without the other creating a bit of a catch 22 problem.
My lesson learned here was while squaring things and putting things to the
fourth power may be good for removing information but they add noise and
shouldn’t be used to haphazardly.
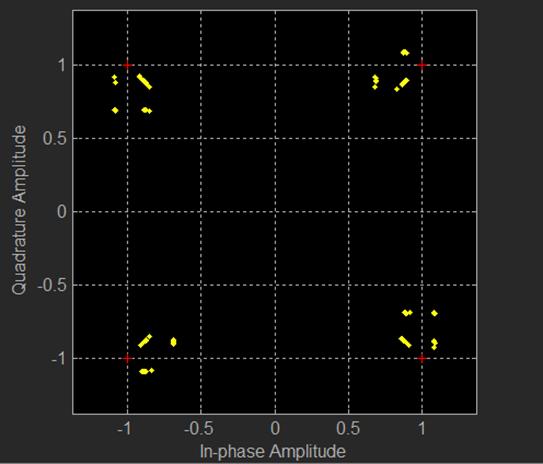
Correct symbol timing
incorrect carrier timing
My next attempt
at a demodulator was far more successful and I think very good.
I wanted it to be more block orientated as programming in Matlab
this way is easier. I also wanted that symbol timing was not reliant on carrier
timing and vice versa. The idea with this demodulator was that small blocks of
data after the matched filter were processed assuming a constant symbol rate
and a fixed carrier rotation error. The carrier rotation error would be assumed
to be unknown and all rotations between 0° and 90° would be examined to
determine if any symbol oscillations could be detected. The rotation that had
the greatest symbol oscillations would then be chosen as one of the two
possible candidates for what was regarded as the real arm, the other being this
rotation plus 90°. The phase of the symbol oscillations would either be the
real arm or the imaginary arm, therefore symbol tracking could be used to
determine if the found carrier rotation was for the
real or imaginary arm and hence resolve the carrier offset to between -90° and
+90° thus reducing the possibility of cycle slips compared to the fourth power
method. That is my idea for carrier and symbol timing, so let’s delve into
greater detail.
Carrier and symbol timing estimations
A small block
of data is obtained after the matched filter assuming a fixed carrier rotation
and symbol timing. This block is rotated first 0° then 1° and so on up to 89°,
each of these rotations is then squared and the real component examined for
oscillations that happen due to the symbol rate. If there was no carrier
rotation then for the block that was rotated 0°, the real component of this
block would contain one of the streams of data and can be seen in the following
figure in blue while that of squaring each item in the block and then taking
the real component of this can be seen in the following figure in red.
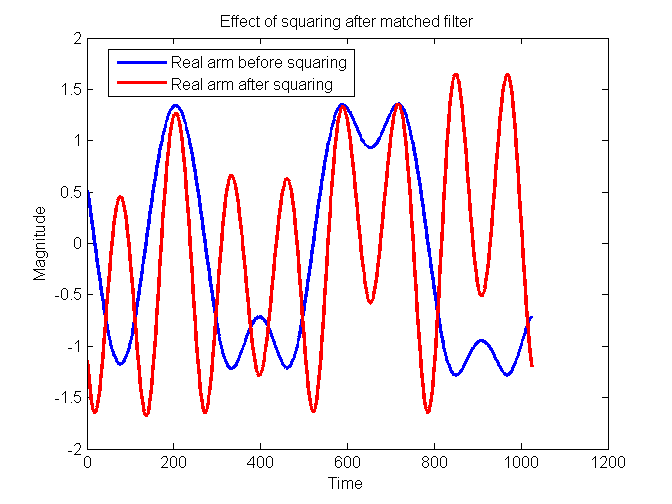
Effect of squaring after the
matched filter
It can be seen
that the peaks of the red plot match the sampling time for this particular
stream (or arm) of MSK data. As each stream is sent at a rate of 1/(2T) where T
is the symbol period, a Discrete Fourier
Transform (DFT) of 1/(2T) will supply us with both an estimate of the
amount of the signal strength for a particular rotation and the symbol phase so
as to inform us when to be sampling. The rotation that causes the greatest
signal strength will be a rotation that aligns one of the MSK data streams along
the real axis, this is the rotation we are looking
for. A block diagram of the procedure is shown in the following figure.
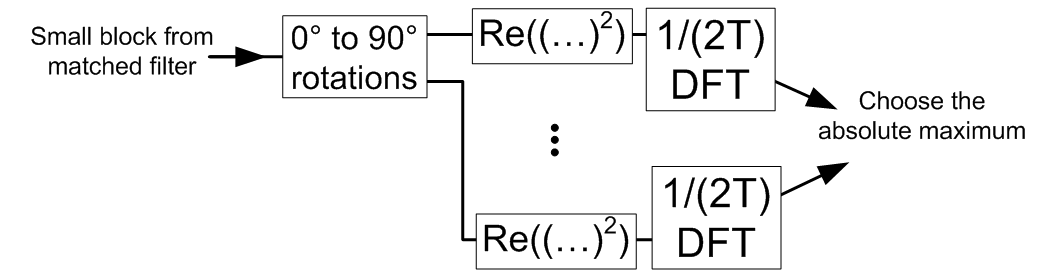
First step in finding carrier
rotation and symbol timing
A Matlab code snippet can be seen as follows where sig2 is the small block of data while the carrier rotation
estimate is rotationest and the symbol phase timing estimate is symboltimginphaseest.
|
%Find rotation
that makes real have symbol oscillation and get phase of this
oscillation rotationest=0; bigestval=-1; %as long
as numberofsymbolstoxferpercycle is even the peak
falls on a bin expectedhalfsymbolratepeakloc=numberofsymbolstoxferpercycle/2+1; N=numel(sig2); n=[0:N-1]'; for rkl=0:1:89 testsig=(real((sig2*exp(1i*rkl*pi/180)).^2));%rotate square and take real
val=sum(testsig.*exp(-1i*2*pi*n*(expectedhalfsymbolratepeakloc-1)/N));%1bin
DFT aval=abs(val); if aval>bigestval bigestval=aval; rotationest=rkl; symboltimginphaseest=angle(val); end end |
First step in finding carrier rotation and symbol
timing code snippet
This is only
the first step in estimating carrier phase and symbol timing. This is because we
may have found the carrier rotation of the wrong MSK data stream and the
returned symbol timing phase estimate may also be for the wrong MSK data
stream. To solve this problem we randomly track one of the MSK data streams and
perform a judgment call as to which MSK data stream the previous step has given
us. As the symbol timing phases of the two MSK data streams are 180° out of
phase, if the returned symbol timing phase estimate given to us from the
previous step is more than 90° out from where we believe the current symbol
timing to be, we performed a judgment call that indeed we have been given the
wrong MSK data stream and that the symbol phase timing estimate is 180° out
while the carrier rotation is out by 90°. A GIF animation of both the symbol timing
phase estimate returned from the previous step and the symbol timing phase
tracking can be seen in the following figure. The inner dots represent the
symbol timing while the outer ones represent the symbol timing phase estimate
returned from the previous step.
Symbol timing tracking given
symbol timing phase estimate from the previous step
A Matlab code snippet of the symbol timing tracking and reduction
of carrier phase ambiguity can be seen in the following code snippet where hSymTracker.Phase is the tracked symbol timing phase estimate and carriererror
the carrier rotation error with reduced ambiguity to between -90° and +90°.
|
%%%T/2
symbol tracking on real oscillations and reduction of carrier ambiguity symerrordiff1=angle(exp(1i*symboltimginphaseest)*exp(-1i*hSymTracker.Phase)); symerrordiff2=angle(exp(1i*(symboltimginphaseest+pi))*exp(-1i*hSymTracker.Phase)); symerrordiff=symerrordiff1; if(abs(symerrordiff2)<abs(symerrordiff1)) symerrordiff=symerrordiff2; rotationest=rotationest+90;%reduction
of carrier ambiguity end hSymTracker.Phase=hSymTracker.Phase+hSymTracker.Freq; hSymTracker.Phase=hSymTracker.Phase+symerrordiff*0.333; hSymTracker.Freq=hSymTracker.Freq+0.001*symerrordiff; if abs(hSymTracker.Freq)>(0.1) hSymTracker.Freq=(0.1)*sign(hSymTracker.Freq); end hSymTracker.Phase=mod(hSymTracker.Phase+pi,2*pi)-pi; carriererror=(pi/180)*(rotationest-90); |
Second step in finding carrier rotation and symbol
timing code snippet
Next the
carrier of the receiver has to be adjusted using the estimate from the previous
step so as the receiver maintains a coherent oscillator with respect to the
modulator’s oscillator. This is simply done by gently adjusting both the phase
and the frequency of the receiver as can be seen in the following Matlab code snippet.
|
%phase
adjustment for next time hPFOd.PhaseOffset=hPFOd.PhaseOffset+(180/pi)*carriererror*cos(carriererror)*0.7; hPFOd.PhaseOffset=mod(hPFOd.PhaseOffset,360); %adjust
carrier frequency for next time hPFOd.FrequencyOffset=hPFOd.FrequencyOffset+0.5*0.90*(180/pi)*(1-cos(carriererror))*carriererror/(360*numberofsymbolstoxferpercycle*SamplesPerSymbol/Fs); if
abs(-hPFOd.FrequencyOffset-hPFOu.FrequencyOffset)>(MaxFreqDeviationLock)
hPFOd.FrequencyOffset=-hPFOu.FrequencyOffset-(MaxFreqDeviationLock)*sign(-hPFOd.FrequencyOffset-hPFOu.FrequencyOffset); end |
Carrier phase and frequency adjustment given carrier
error estimate
However, this carrier tracking requires a very good
initial frequency estimate else it won’t work. Because of this a coarse
frequency estimate within a few hertz is needed for carrier tracking to work.
This coarse frequency estimate I obtained by examining the spectral peaks when
the baseband is squared. If you square the baseband signal and take Fourier
transform of it you obtain something like the following.
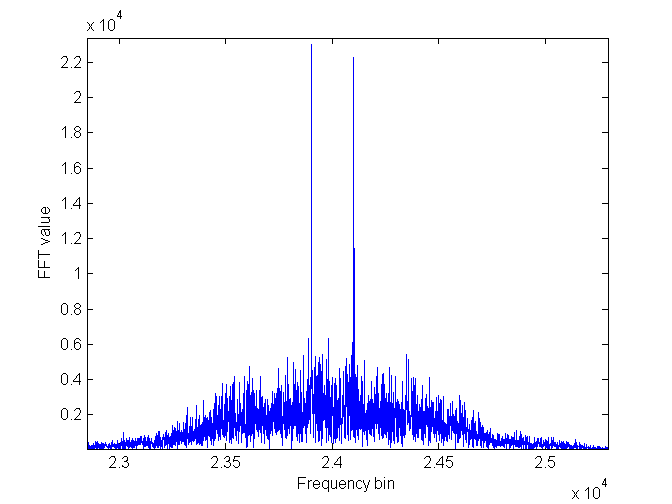
FFT of the baseband squared
for coarse frequency estimation
The two spectral peaks correspond to the two
frequencies used to make the MSK. The average of these two frequencies is that of
the transmitter and is the frequency we wish the receiver to be at. The
following code snippet takes the baseband signal (rawt)
and estimates the transmitter’s frequency as hPFOd.FrequencyOffset.
|
%course
freq estimate and correction if needed fftbuffer(fftbufferblkptr*SamplesPerSymbol+1:fftbufferblkptr*SamplesPerSymbol+SamplesPerSymbol)=(rawt).^2; fftbufferblkptr=fftbufferblkptr+1;fftbufferblkptr=mod(fftbufferblkptr,fftbufferblkcnt); if(~fftbufferblkptr) %find peaks tmp=fftshift(fft(fftbuffer)); hzperbin=(Fs)/(numel(tmp)); [~,locs] = findpeaks(abs(tmp),'NPeaks',2,'SortStr','descend');
freq_course_offset_est_hz=(mean(locs)-numel(tmp)/2-1)*hzperbin/2;
freq_diff_est_hz=hzperbin*abs(locs(2)-locs(1))/2; freq_spacing_error_hz=abs(freq_diff_est-(symbolrate/2)); %correct freq if needed if(freq_spacing_error_hz<5)%probably
the right peaks if(abs(freq_course_offset_est_hz)>2.5)%fine
freq tracking probably cant lock so use course freq estimate instead hPFOd.FrequencyOffset=hPFOd.FrequencyOffset-freq_course_offset_est_hz; fprintf('\nCourse
freq adj..!!!!!! New freq = %gHz\n',hPFOd.FrequencyOffset); end end end |
Coarse frequency estimate and correction if needed
Putting everything
together the demodulator can be depicted as follows.
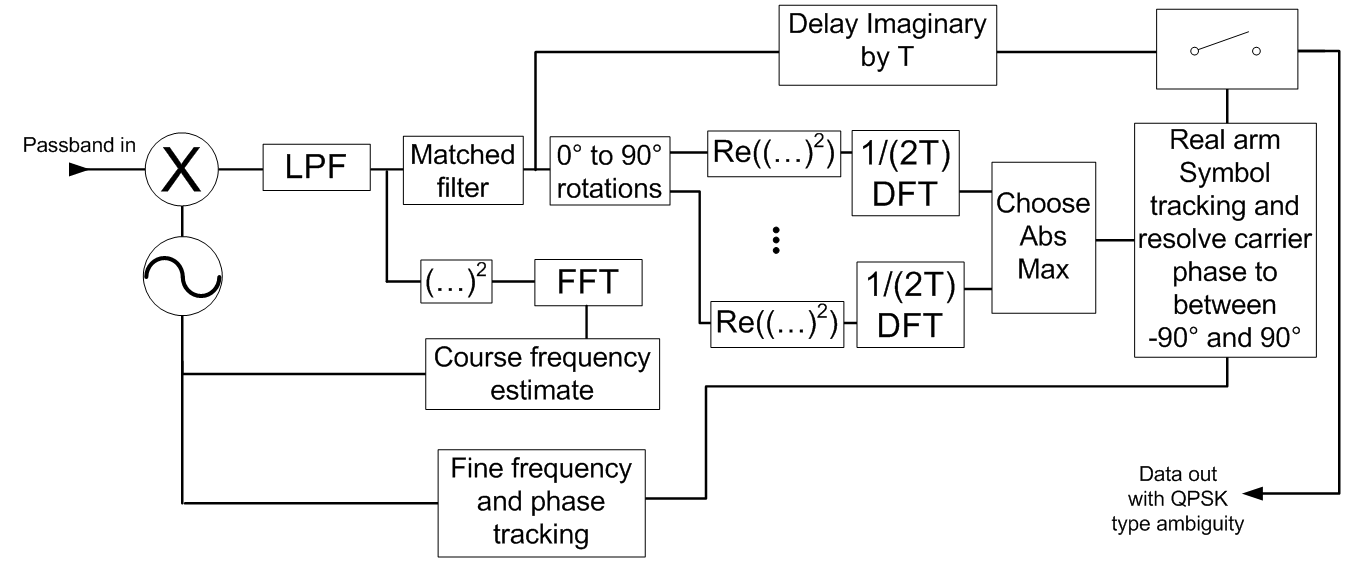
MSK Demodulator block
diagram
This type of
demodulator is a coherent demodulator and does not use differential encoding.
Without using differential encoding there is an ambiguity in the final data
points where the rotation can be either 0°, 90°, 180°, or 270°. With respect to
Bit Error Rate (BER) in the presence
of AWGN this type of demodulator performs slightly better than if differential
encoding was used which in turn performs slightly better than an incoherent
demodulator with differential encoding.
The
following figure shows a Matlab simulation of the
demodulator with initially an incorrect symbol rate and carrier frequency and a
certain amount of AWGN. After a few seconds to allow the demodulator to acquire
the signal the demodulated data was recorded and this continued for
approximately 300,000 bits. The final ambiguity was resolved by taking the
lowest BER and plotted in the graph below along with theoretical plots for incoherent Differential Binary Phase Shift
Keying (DBPSK), coherent
Differentially Encoded Binary Phase Shift Keying (DE-BPSK) and coherent Binary Phase Shift Keying
(BPSK).
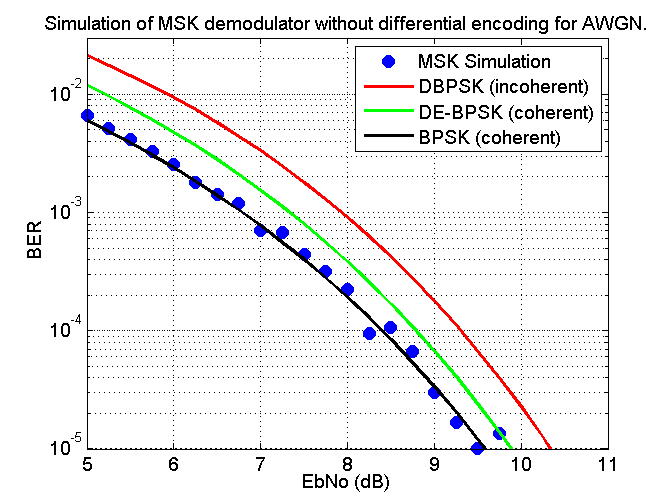
Simulation
of MSK demodulator without differential encoding for AWGN
The reason
for including the theoretical plots is to show that this form of MSK demodulator
has the same performance in the presence of AWGN as a coherent BPSK
demodulator. The incoherent DBPSK plot (red plot) I believe is how most if not
all PSK31 demodulators work.
Differential
encoding
I wanted to implement differential encoding so I did
not have to worry about resolving the final ambiguity and instead take the
small performance hit as seen in the previous figure and move to the green plot.
Without my so-called 1/-1s to +/- encoder the modem naturally perform some sort
differential encoding. So I tried to see if I could gain some understanding on
how this naturally occurring differential encoding happens.
For the 1/-1s to +/- encoder (the encoder), if we
represent – and + by 0 and 1 respectively and -1 and 1 by 0 and 1 respectively
this encoder can be depicted as follows. That it seems to need an oscillator is
the reason why I think it’s not convolutional
encoder. Due to the oscillator any datastream that
goes in can be mapped to one of two output data streams. In addition any input
bit can only affect the current output bit and the next output bit. It also has
a rate of one. If it wasn’t for the oscillator it would look like the standard
differential decoder as seen on the page https://en.wikipedia.org/wiki/Differential_coding
.
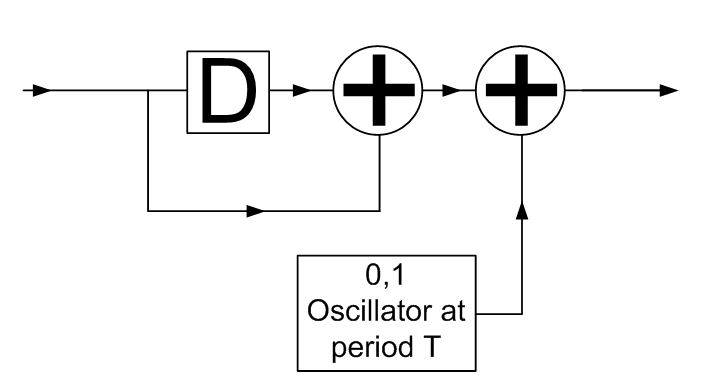
The
encoder
To create
differential encoding we now remove the original encoder so the modulator looks
like the following figure.
Modulator
with differential encoding
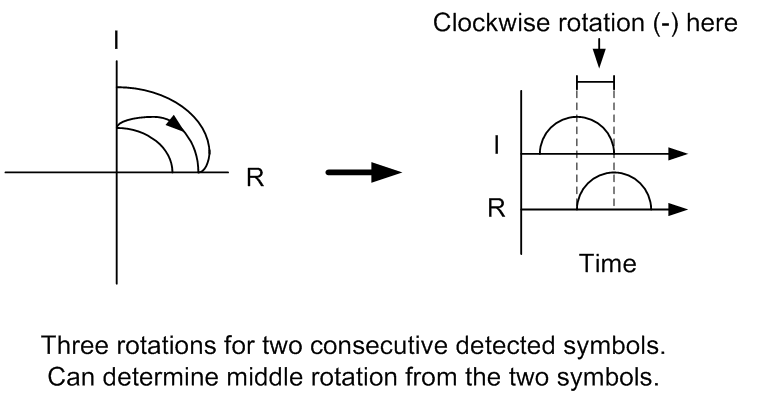
With the the -1s and 1s we wish to send now mapped to the – and +
quarter rotations respectively, it is possible to detect the direction of
rotation of one of the three rotations when given two consecutive received
symbols. As an example if we start on the real axis and send the rotations +-+
we will receive first a 1 on the imaginary arm then a one on the real arm; in this
case the middle rotation can be determined to be a - from just the two received
symbols. Visually this process can be seen in the following figure.
The first
and the third rotations do not affect the middle rotation. Going through all
eight possibilities we obtain the following mapping where ![]() represent the consecutively received symbols a and b from the imaginary and real arms
respectively. Likewise
represent the consecutively received symbols a and b from the imaginary and real arms
respectively. Likewise ![]() the consecutively received symbols b and
a from the
real and imaginary arms respectively.
the consecutively received symbols b and
a from the
real and imaginary arms respectively.
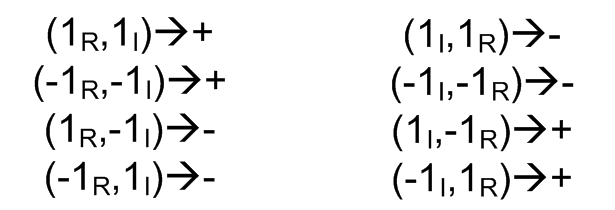
Mapping
of the eight possibilities for two consecutive symbols
This can be
drawn as a trellis diagram as follows where the first set of transitions are
due to the received imaginary symbol, while the second set of transitions are
due to the received real symbol.
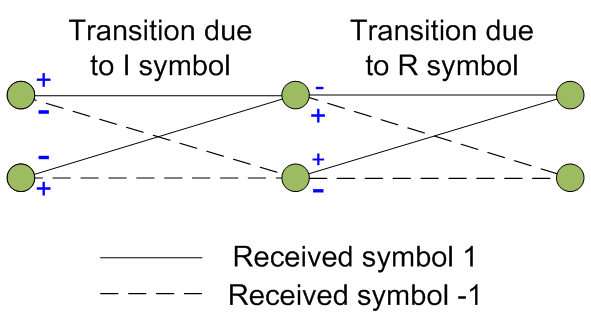
Trellis
diagram for the mapping from symbols to rotations
Noticeably
there is a similarity between the two sets of transitions, where the second set
of transitions the output has simply been inverted compared to the first. This
inversion allows an obvious implementation simplification by simply inverting
the output of the trellis diagram if the transition is due to an imaginary
symbol and removing the distinction between transitions due to the imaginary
symbol and ones due to the real symbol. The transitions due to the real symbol
is simply a standard differential decoder, therefore an implementation of the
above trellis diagram can be given as follows where – and + are mapped to 0 and
1 respectively while -1 and 1 are mapped to 0 and 1 respectively.
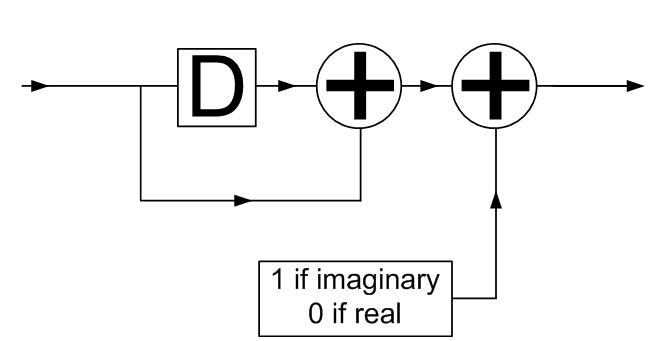
Implementation
of mapping symbols to rotations
As can be seen
this is almost identical to what the encoder was except the oscillator has been
replaced with something that is linked to whether or not an imaginary symbol or
real symbol is being processed.
For my
implementation of the demodulator I always delay the imaginary arm by T meaning
the imaginary component has to be processed before the real component; this
being the case the following Matlab code snippet is
enough to allow the demodulator to decode varicode
symbols that have been sent via the naturally occurring differential encoding
that gets performed by the modulator when not using the encoder. I’m always
amazed how much thinking goes into figuring out something that in the end look
so simple.
|
im=1-hdiffdec.step(imag(thisonpt)>0); re=hdiffdec.step(real(thisonpt)>0); fprintf(vari_decode((im>0))); fprintf(vari_decode((re>0))); |
Matlab code snippet for decoding
differentially encoded MSK
Testing differential encoding
Now we have a
method of performing differential encoding and decoding using MSK we can check
the performance matches that with what should be expected. The following figure
was created using the same demodulator as previously been described except with
the removal of the encoder on the modulator and with the additional
implementation of the differential decoder as just described.
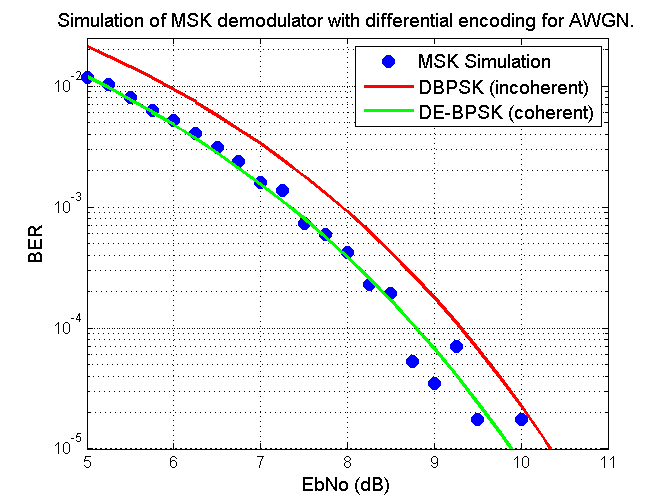
Simulation
of MSK demodulator with differential encoding for AWGN
As can be seen
the results are very similar to coherent differentially encoded binary phase
shift keying; we take a hit of approximately half a decibel as expected but
gain the benefit of not having to resolve any ambiguities. For the remainder of
this document I solely use this method of differential encoding. In addition I
use varicode as implemented in PSK31 to transmit text
through the modem.
Almost real life testing
Before
commencing any real life tests using physical external hardware I chose to use
spectrum lab and the digimode component that it has
to create varicode differential encoded MSK for my Matlab implementation to decode. To get spectrum lab to
modulate using MSK I used the following settings.
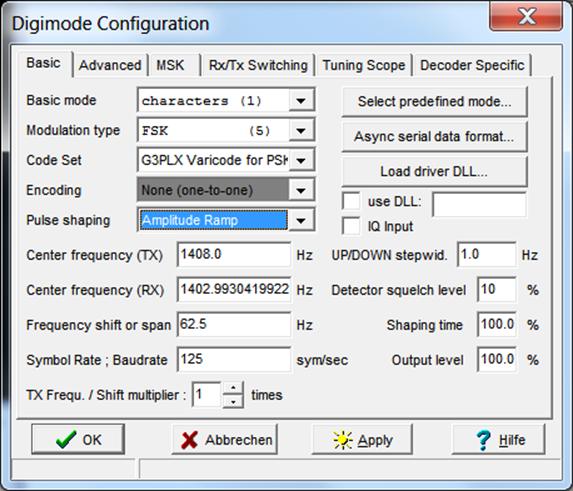
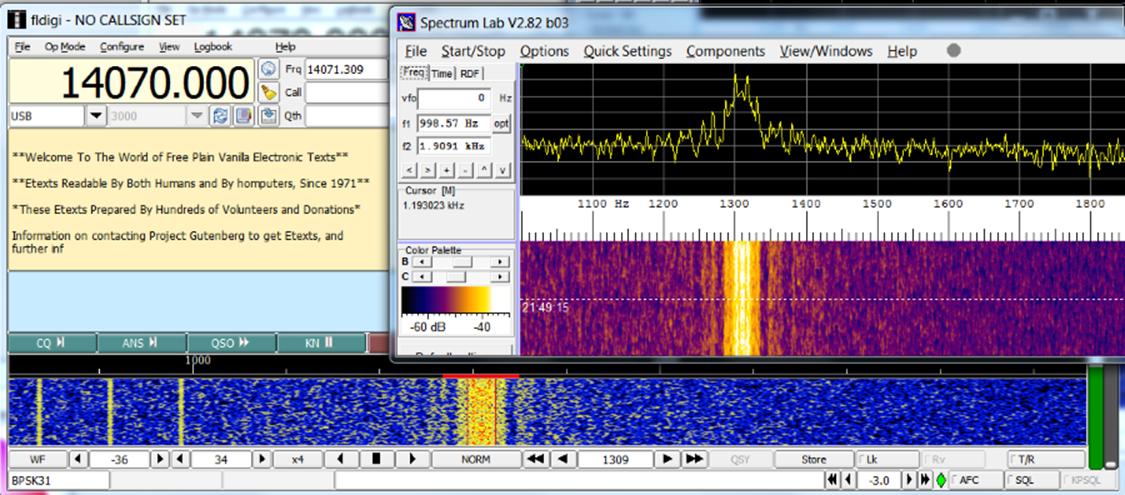
Settings
used for spectrum lab to modulate MSK
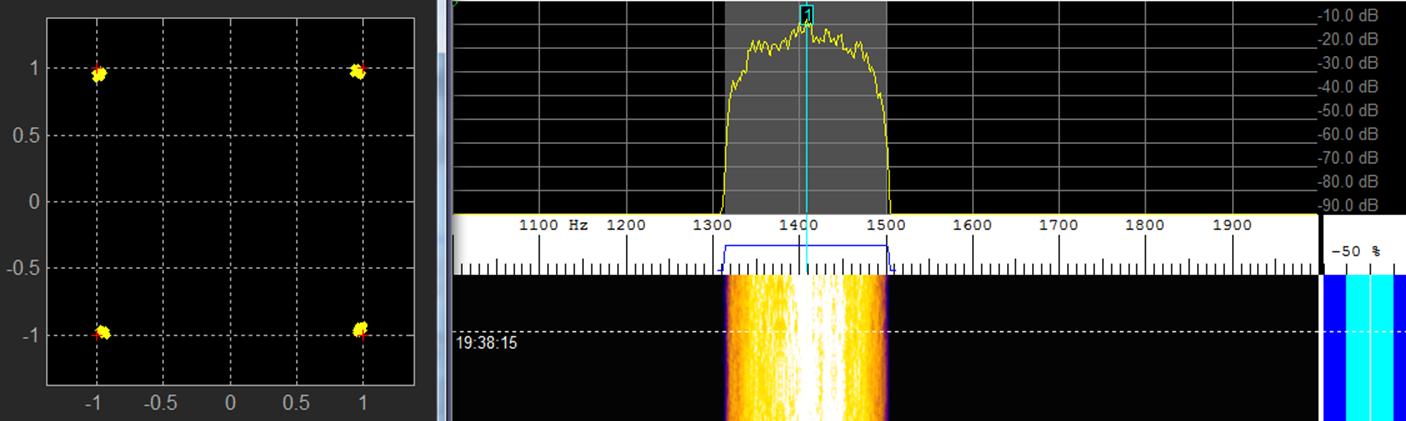
Spectrum lab
uses a continuous phase frequency shift keying so the previous settings will be
able to produce MSK at 125 bps. The following figure shows my Matlab implementation decoding the signal along with the
spectrum of the MSK signal.
Matlab decoding Spectrum lab MSK signal: no
filtering.
In the next
figure I have filtered everything beyond the first nulls of the signal with
little noticeable effect on the demodulator.
Matlab decoding spectrum lab MSK signal:
filtering beyond first nulls
The text was
decoded perfectly both times.
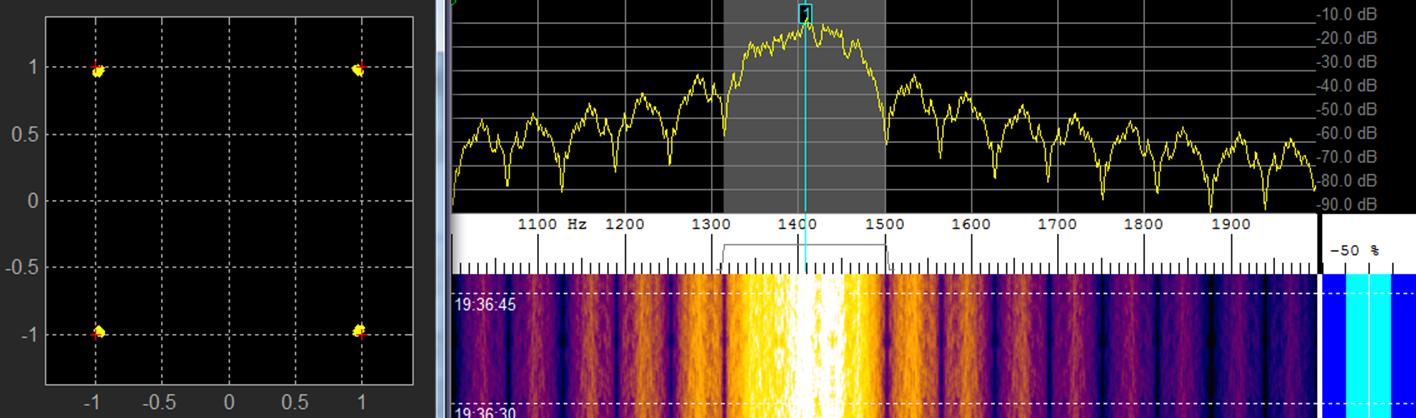
Initial real life testing
A laptop was
setup with the Arduino and the DDS chip as used in JDDS
. A program was written in Qt to cause the DDS chip to produce a MSK modulation
at 125 Baud that was encoded with English text. An RTL-SDR dongle was attached
to another computer and SRD# used to receive the RF signal from the DDS chip.
The two computers were separated by less than a meter. The following screenshot
shows the computer with the RTL-SDR dongle demodulating and decoding the
English text.
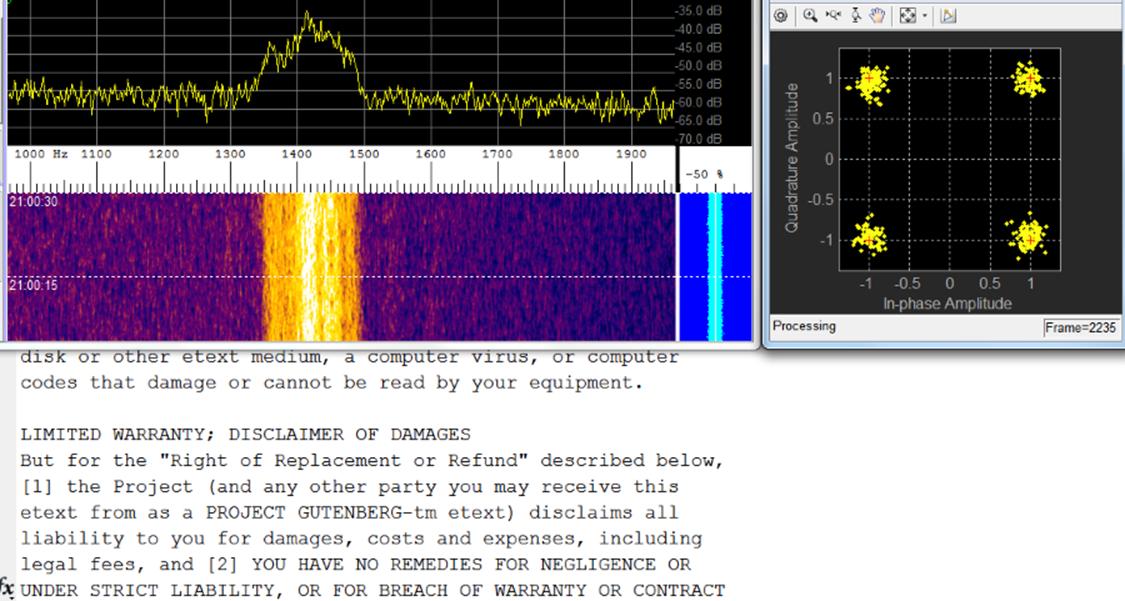
Demodulating MSK sent over
RF via the DDS chip
The top left shows
the received frequency spectrum, the top right is the four-point constellation,
and the bottom is the text as it is being received.
I used a three
second buffer for the coarse frequency estimation and a block by block
processing of 128 ms where any remaining carrier offset was compensated for. This
produced some jitter of the points but removed any bias in the constellation
and speed up the time required until readable text was seen. This meant after the
three seconds to estimate a course frequency, for a reasonably strong signal, readable
text was seen after a hundred milliseconds or so.
Generally
things performed as expected and I was very pleased with the performance of the
demodulator. From a cold computer once the power had been applied to the DDS
chip, the DDS chip’s local oscillator would be somewhat erratic initially and whose
frequency would tend to decrease as the oscillator warmed up; this can be seen
in the previous figure where the frequency is dropping ever so slightly. After
10 minutes the DDS chip’s oscillator would stabilize. During the period when
the oscillator was erratic, the demodulator still had no problem maintaining
correct carrier timing.
Weaker real-life signal
test
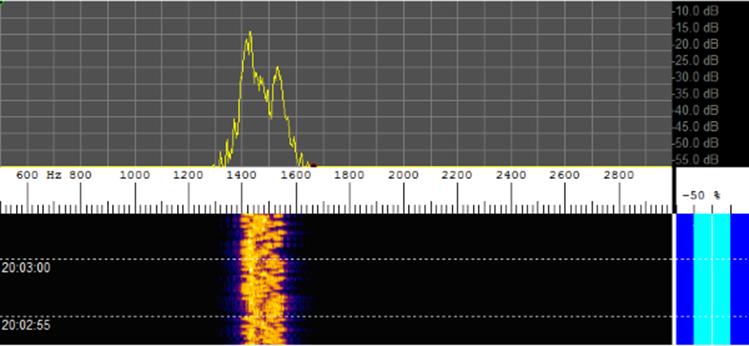
Reducing the RTL
dongle RF amplifier gain and reducing its antenna I went about seeing how low
the signal could be before demodulator would perform poorly. I use the same 125
Baud rate as before. The figure below shows about as far as I could push it and
there are considerable numbers of errors in the received text. The signal was
so weak that I had difficulty hearing it.
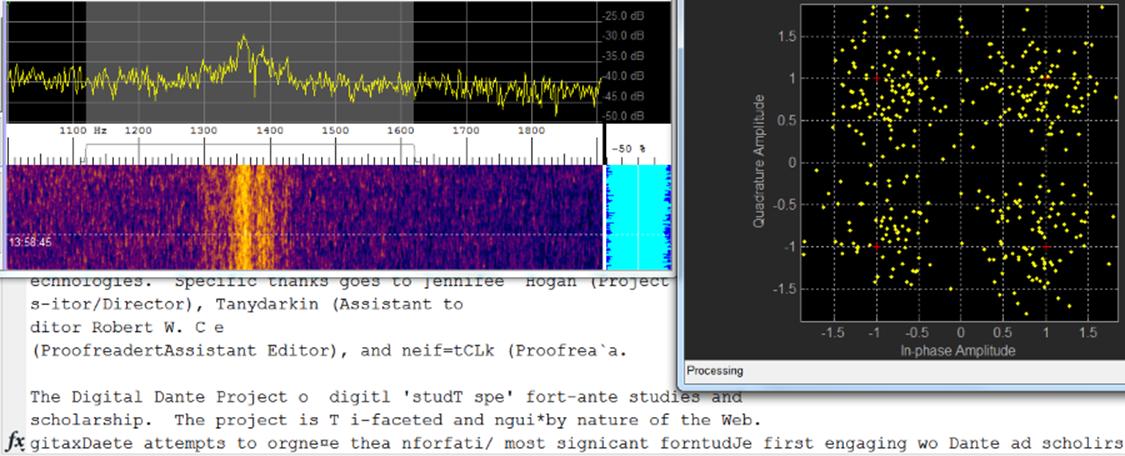
MSK demodulation with a very
weak signal
26 meter test of MSK at 50
Baud and PSK31
I placed the
DDS chip 26 meters away in the garage which was clad in metal and separated by
three walls. I put a small piece of wire on the DDS chip. I performed two tests,
one where the DDS chip produced an MSK signal and another where it produced an unfiltered
DBPSK signal. The MSK was at 50 Baud and the DBPSK was at 31.25 Baud. Below is
a screenshot of the received spectrum, constellation and the decoded text using
the described demodulator for the MSK test.
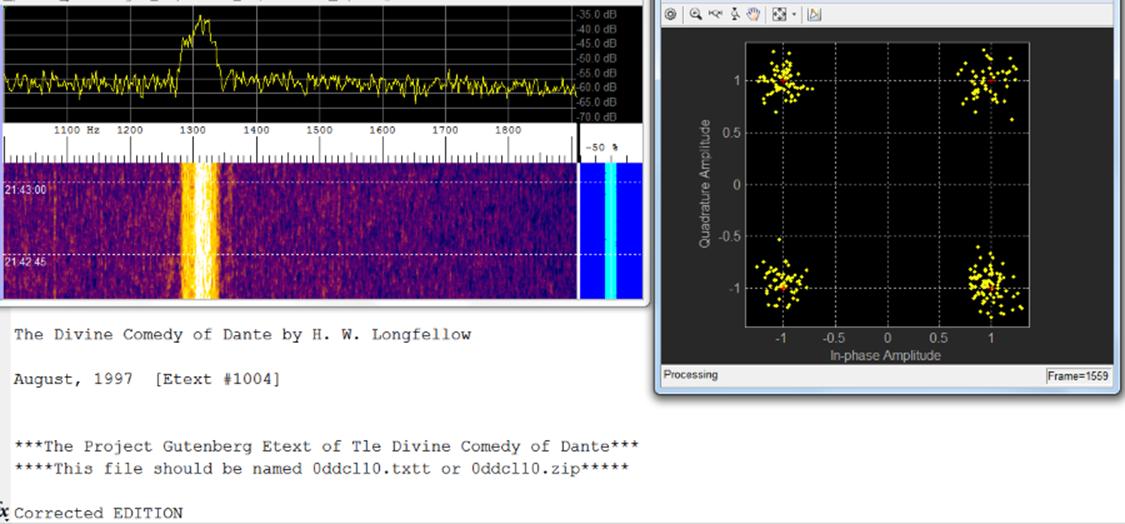
DDS chip producing MSK at 50
Baud. 26 meters
The next
screenshot is of the DBPSK test and comprises of the received spectrum (Spectrum
lab’s scale is the same as that of the MSK test) as well as the decoded text
using Fldigi as the DBPSK demodulator.
DDS chip producing DBPSK at
31.25 Baud (like PSK31). 26 meters
For both tests the
signals were good. I saw one incorrect character shortly after acquisition
during the MSK test, and another incorrect character for the DBPSK test which
can be seen in the previous figure. The first one or two side lobes of the
DBPSK test can be clearly seen while it is hard to tell if any side lobes from
the MSK signal can be seen. This brings me to one of the reasons why I’m
interested in MSK for the DDS chip rather than BPSK.
Spectral components of
unfiltered BPSK and MSK
The DDS chip is unable to produce filtered BPSK as it
stands. Even if it could it would require a linear amplifier which is not
something I like as linear amplifies are more complicated and less power
efficient. Therefore it must produce unfiltered BPSK. Connecting the DDS chip
directly to the soundcard I obtained the following spectral plot when the DDS
chip was modulating using BPSK at 125 Baud.
Spectral plot of BPSK at 125
Baud
I then averaged the spectral components over a longer
period of time and calculated approximately the peak of each side lobe as can
be seen in the following figure.
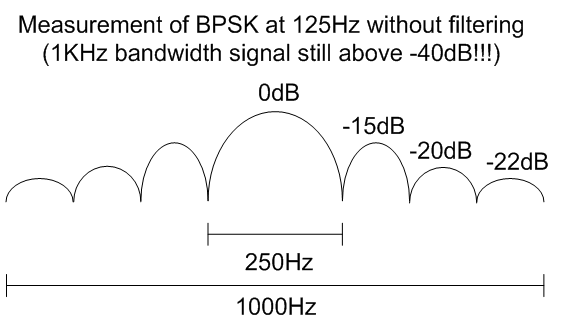
As a rule of thumb I consider as a minimum, the maximum
out of band power peak must be at least 40 dB less than the maximum in band
power peak. From the previous figure even with approximately a 3 kHz bandwidth this
is not enough bandwidth to satisfy this rule of thumb. There is approximately a
30 dB difference between the center of the plot and either of the sides of the
plot. As the bit rate is only 125 bits per second this is very spectrally
inefficient at less than 0.04 b/s/Hz; you would not
want to transmit this signal in real life.
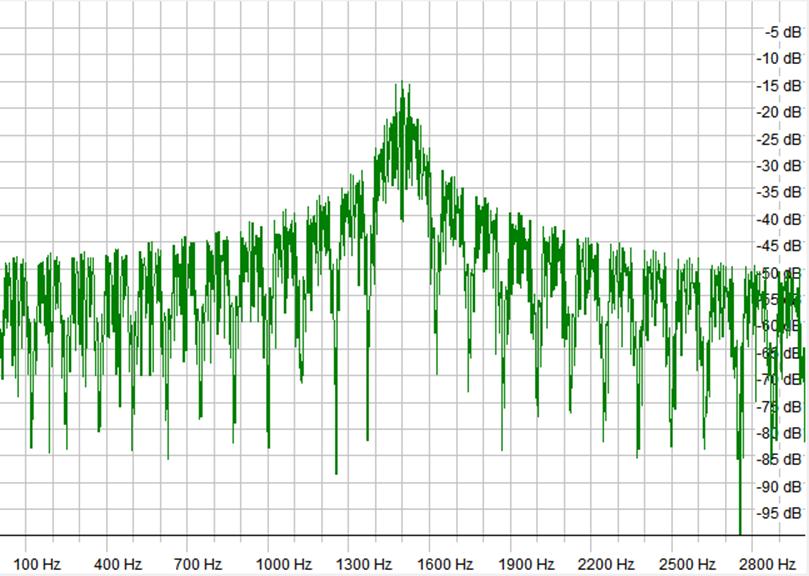
I then performed the same test but used MSK to
modulate the DDS chip at 125 Baud and obtained the following spectral plot.
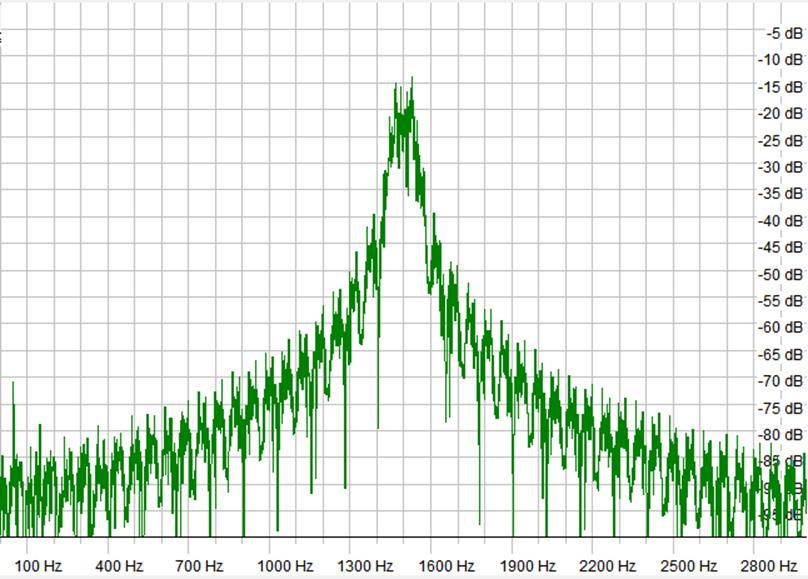
Spectral plot of MSK at 125
Baud
This again averaging the spectral components over a
longer period of time and calculating the approximate peak of each side lobe I
produced the following figure.
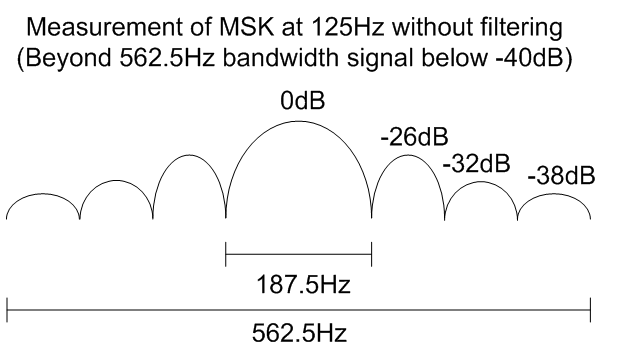
This time the falloff in power has been improved
greatly. A bandwidth of approximately 562.5 Hz (4.5 times the bit rate) would
satisfy my 40 dB rule of thumb. This produces a spectral efficiency of approximately 0.22 b/s/Hz. This is not a great spectral
efficiency but it’s a lot better than BPSK and would be fine for slow bit rate
applications. In addition, as MSK has a constant envelope it is suitable for
amplification using nonlinear amplifies which are simple to make and power efficient.
The other reason I’m
interested in MSK rather than BPSK
16MSK is a generalization of MSK to 16 frequencies
rather than two. Like MSK the frequencies and the Baud rate are related so if
you are on the real axis any symbol will move you to the imaginary axis and
vice versa. This means if a symbol has a period of T, then the 16 frequencies used
for 16MSK are -15T/4, -13T/4, -11T/4, -9T/4, -7T/4, -5T/4, -3T/4, -T/4, +T/4,
+3T/4, +5T/4, +7T/4, +9T/4, +11T/4, +13T/4, +15T/4. I have no way of
demodulating 16MSK at the moment but I can produce it easily enough using the
DDS chip as can be seen in the following figure.
16MSK at 100 b/s
Matlab seems to
call what I’ve been referring to as MSK as 2CPFSK with modulation index 0.5,
and 16MSK as 16CPFSK with modulation index 0.5. Using Matlab’s
“bertool”, I plotted what Matlab considers to be the
theoretical BER versus EbNo curves for BPSK, 2CPFSK and 16CPFSK where the
modulation indices of the two CPFSK modulation schemes where 0.5; this plot can
be seen in the figure below where BPSK curve cannot be seen because it lies
under the 2CPFSK curve. If this is true, Matlab is saying that a gain of 6 dB
can be achieved by using 16CPFSK rather than 2CPFSK or BPSK; that’s equivalent
to saying that you can get away with using only a quarter of the power you
would normally use to transmit a signal using say BPSK or MSK.
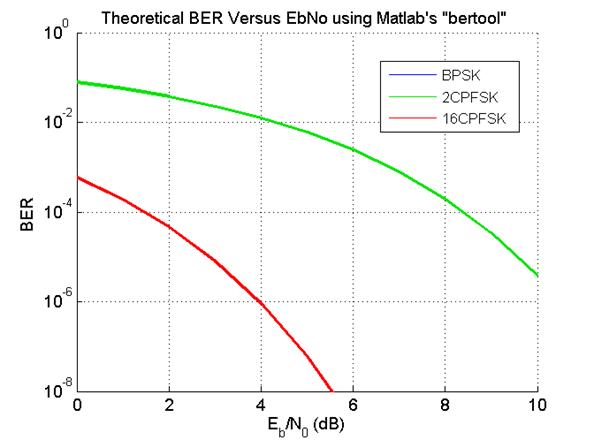
Theoretical BER Versus EbNo
using Matlab’s “bertool”
2CPFSK and 16CPFSK have modulation indices of 0.5
This extremely large gain is very attractive and is the
other reason I’m interested in MSK. I’m interested in extending the demodulator
I’ve implemented to 16MSK. This however is for another day.
The DDS chip as a
modulator
Using the DDS chip is a modulator was pretty easy. It
used my SLIP library and a simple Arduino code. A
short video clip of me using it to send both DBPSK and MSK is given in the
following video clip.
Sneding
DBPSK and MSK using the DDS chip
The source code for both the PC and the Arduino are given below. It could do with a tidy up but it’s
what I’ve been using.
DDS chip modulator download:
|
Source code |
Source code for the Matlab MSK demodulator
The Matlab source code for
the MSK demodulator is given below. Once again it is something that could do with
a tidy up, but it works.
MSK demodulator Matlab source code download:
|
Source code |
Cross-platfrom stand alone binary
The Matlab demodulator as described on this page has now been ported to Qt C++. This allows the demodulator to be run without the need for Matlab. See the JMSK main page for this application.
Jonti 2015
Home